

type
status
date
slug
summary
tags
category
icon
password
总结了DCS World中空战相关的内容,持续更新……
绪论
先引用维基百科对空战的定义:
空战是利用军用飞机和其它飞行器进行的航空作战。
现代空战主要有超视距空战(Beyond Visual Range,简称BVR)和视距内空战(Within Visual Range,简称WVR)两种。其中超视距空战是指交战双发无法目视发现对方,只能依赖其搭载的电子设备进行搜索和探测,并指引中、远程空空导弹攻击目标。视距内空战也称为空战格斗(Air Combat Maneuvering,简称ACM)或狗斗(Dog Fight),是指交战双方可以相互目视发现,通过机炮或者近程空空导弹来进行交战。在导弹诞生以前,空战都发生在视距范围内,而到了当代,超视距空战已经成为了主流,现在战斗机大都采用射完导弹就跑的战术以避免陷入狗斗。为了方便说明,本文主要以美国的F/A-18C“大黄蜂”战斗机为例,并结合DCS World进行说明。

能量机动理论
能量机动理论是美国空军约翰·伯伊德上校和数学家托马斯·克里斯蒂共同提出的,空战的核心就是动能和重力势能的相互转化问题,谁能在空战中更快地转换能量,谁就能获胜。在此模型的基础上推导出了一个评价战斗机机动性的简洁、优美的数学表示,其公式如下:
其中代表飞机的单位剩余功率,代表飞机的速度,为飞机受到的推力,为飞机受到的阻力,为飞机的重量。飞机的各种性能如爬升率、盘旋性能、升限等都与单位剩余功率有关。简而言之,拥有更大的飞机在空战中就越占有优势,因此要增大就需要增大推力,减少阻力,减轻飞机的重量,即提高飞机的推重比和升阻比。F-15和F-16就是这一理论下的经典产物,其中F-15配备的两具F100-PW-100涡轮风扇发动机,每具军用推力为64.9kN,后燃推力为106.4KN,推重比为7.8,将力大砖飞的理念贯彻到底。

F-16在具有大推力的同时,其外形设计也是空气动力学的杰作,F-16采用了翼身融合的设计,机身与主翼平滑过渡,在降低飞机重量、增大机身容积的同时,还减小了雷达反射面积和空气阻力,提高了升阻比。机身前部装有边条翼,用以拉出涡流,从而进一步提高升力。采用静不稳定设计和电传飞控,使得F-16异常灵活,具有出色的机动能力。

人机交互
手不离杆
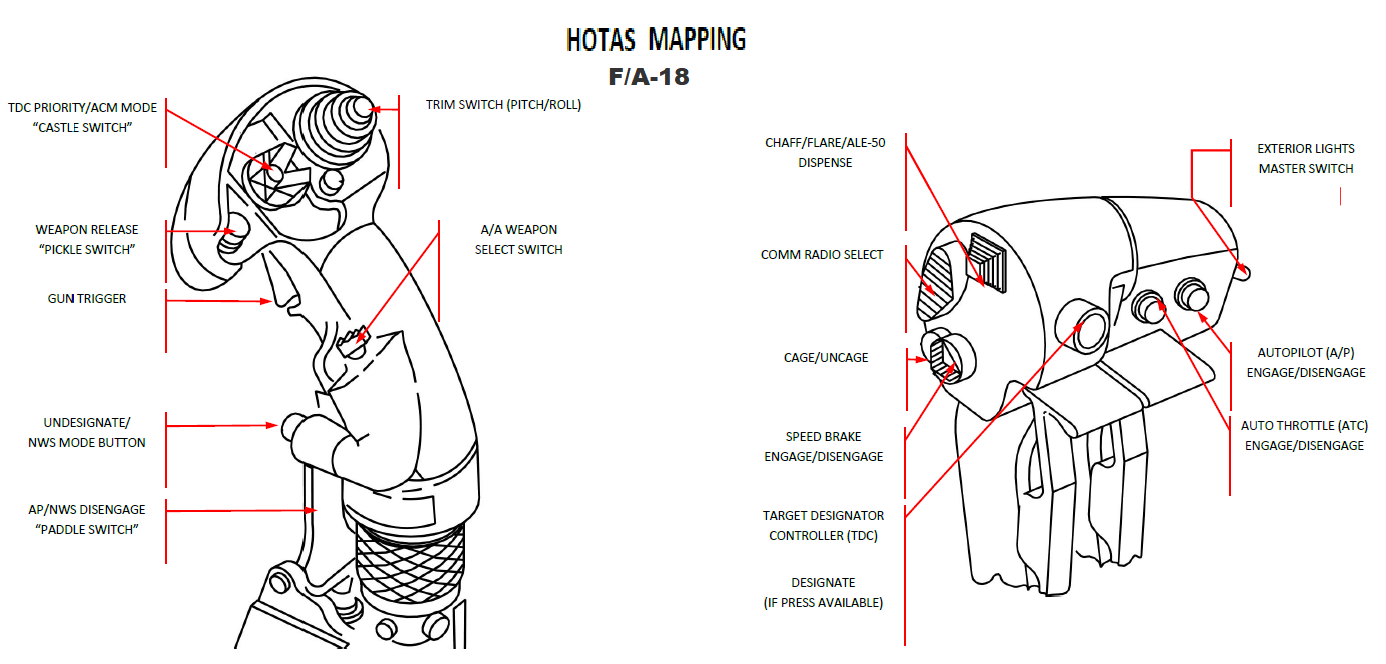
为了让飞行员在操控飞机的同时尽可能将精力投入到作战中,且降低操作难度,HOTAS(Hands On Throttle and Stick)孕育而生。通过布置在驾驶杆和油门上的按键和开关,飞行员可以非常方便地完成对雷达、吊舱、武器、无线电、干扰弹等设备的操作。作为人机工程设计的体现,HOTAS极大地提高了飞机的作战效能。
平视显示器
在早期,飞行员只能通过座舱内的仪表来获取飞机的运动参数,飞行员在操控飞机的过程中需要时不时地低头查看仪表读数,非常不方便。在20世纪中期,美军率先在A-5舰载机上使用了平视显示器(Head Up Display,简称HUD)。HUD的前身是战斗机上的光学瞄准器,其利用光学反射的原理,将计算机处理后的信息投射在座舱前端的一片玻璃或座舱罩上,下图为F/A-18上使用的HUD界面,其为飞行员提供了包括速度、高度、俯仰、航向、攻角、马赫数、过载、时间、武器、目标指示等相关的信息。由于其成像在无穷远处,因此不会受观察者所在位置的影响而产生视差。

多功能显示器
在早期,飞行员只能通过座舱内的机械开关和旋钮对不同的子系统进行设置,例如武器参数、干扰程序、导航信息等,这些子系统通常被凌乱地布置在座舱内的各种位置,且操作过于繁琐,如下图所示。

多功能显示器(Multi-Function Display,简称MFD)则将飞机内的各个子系统都集成进了几块液晶屏中,飞行员能够自定义每一块液晶屏中所显示的内容,通过环绕在液晶屏周围的按键以及前上控制面板(Up Front Cntroller,简称UFC),可以非常方便地查看各个子系统并对其进行设置。MFD作为座舱内的主要交互界面,反映了飞机的“玻璃化”程度,在一定程度上体现了航电系统的先进与否,下图为国产JF-17“枭龙”使用的三块MFD。

雷达系统
在战争中,发现敌人通常是最首要的,否则连自己是怎么死的都不知道。尤其在现代战争中,更是有“发现即摧毁”这一至理名言,只有率先发现敌人,才能制定相应的策略去展开进攻和防御。对于现代飞机而言,发现敌方飞行器就需要依靠各种电子传感器了。
在雷达发明以前,空战都是依靠目视索敌,因此需要飞行员拥有鹰眼一般的视力。得益于电磁波沿直线传播、速度快、距离远、信号衰减弱等特点,早在二战时期,美国和英国就率先装备了雷达用于探测水面和空中目标,到了后期美国更是在F6F“地狱猫”战斗机上搭载了夜战专用的雷达。早期的雷达只具有探测和搜索功能,且不具有敌我识别系统,容易误伤友军(美军传统艺能)。后来随着电子技术的进步,雷达和计算机共同构成了火控系统,不仅可以用来搜索和探测,还可以指引导弹发射和计算机炮的瞄准点。
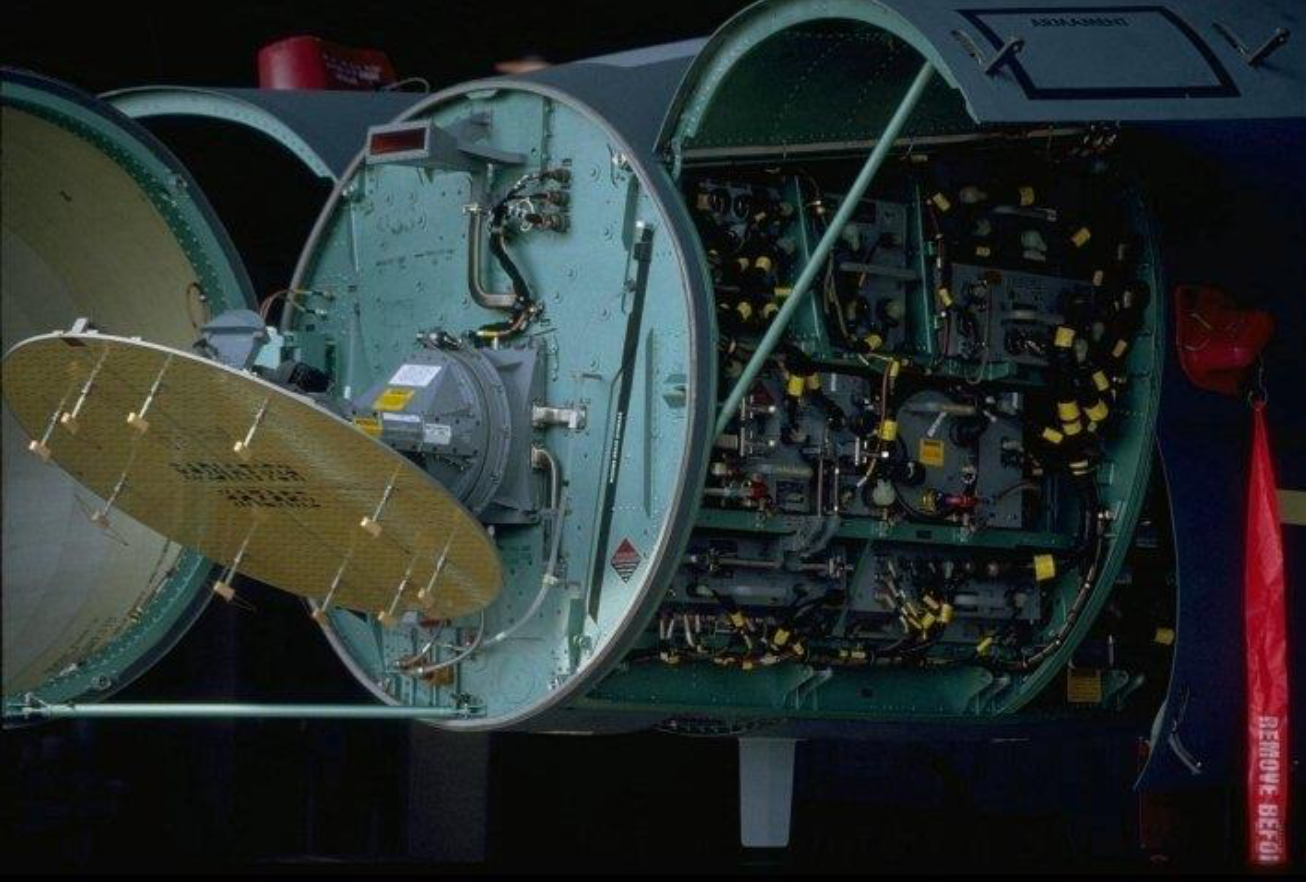
雷达主要由天线、发射机、接收机、伺服系统、数字信号处理机、雷达数据处理机和数据总线等组件构成,战斗机的雷达通常都装在机头处以获得最佳的观测视角。其原理大致为:首先由发射机发出电磁波,信号在遇到敌机后反射,然后被接收机捕获,根据往返的时间差和多普勒效应可以计算出对方的运动方向、相对距离、相对高度以及相对速度等。
注:目前DCS中的飞机均为机械扫描雷达,因此相控阵雷达不在此讨论的范畴中。
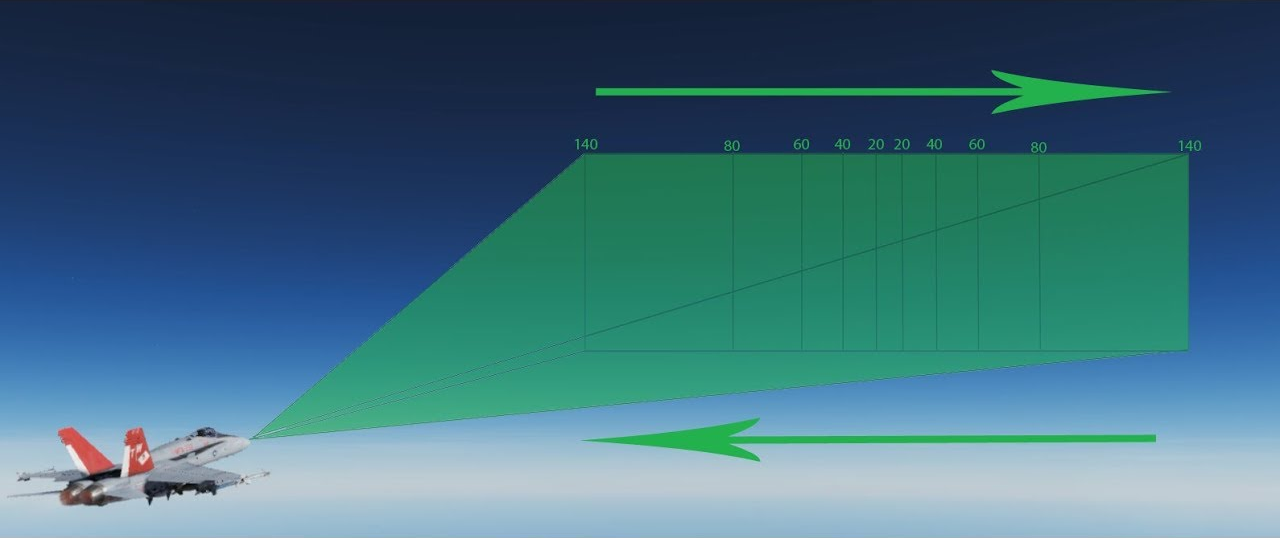
雷达的扫描空间是一个扇形区域,在水平方向和垂直方向均有角度限制。以美机为例,雷达水平扫描范围的单位是角度,垂直扫描范围的单位是千英尺,雷达从左往右或从右往左扫描一次称为1行(Bar),飞行员可以通过按键调整雷达的扫描频率、水平扫描角度和垂直扫描行数。根据上述参数以及交战环境的不同,雷达还具有不同种类的工作模式。
F/A-18C的雷达系统主要包含如下几种模式:边搜索边测距模式(Range While Search,简称RWS)、边扫描边跟踪模式(Track While Scan,简称TWS)、单目标跟踪模式(Single Target Track,简称STT)、聚焦模式(Spotlight,简称SPOT)、自动截获模式(Automatic Acquisition,简称AACQ)、孔径模式(Bore Sight,简称BST)、垂直截获模式(Vertical Acquisition,简称VACQ)、广角截获模式(Wide Acquisition,简称WACQ)和机炮截获模式(Gun Acquisition,简称GACQ)。
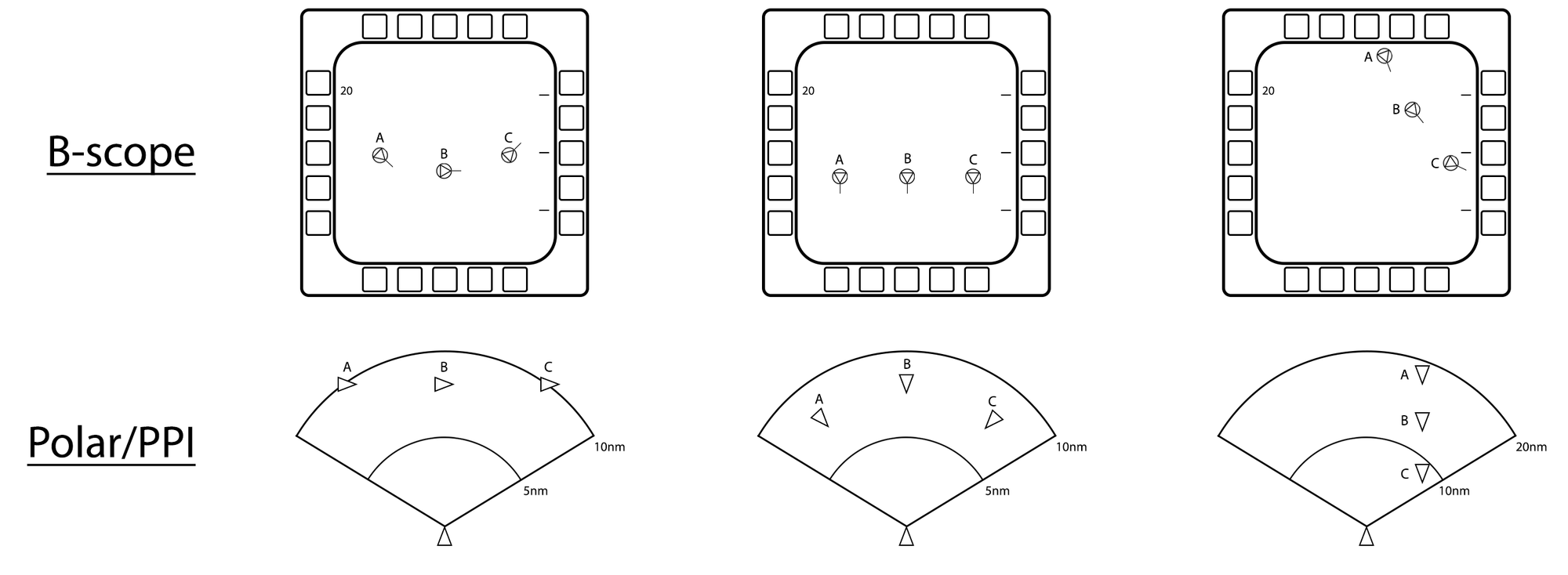
美机的雷达显示面板均使用B-scope显示,而苏机的雷达面板大多使用Polar/PPI显示,两者的区别如图所示。Polar/PPI为现实世界的垂直投影,比较直观易于理解,而B-scope是将Polar/PPI进行变换后得到的,将扇形底部的点拉伸成一条直线后即可得到B-scope显示。B-scope的优点是便于快速读出目标的距离、相同距离的目标显示在同一水平线上,其缺点是由于进行了空间变换,目标的相对位置会发生扭曲和畸变,Polar/PPI的优缺点和B-scope正好相反。
边搜索边测距模式(RWS)
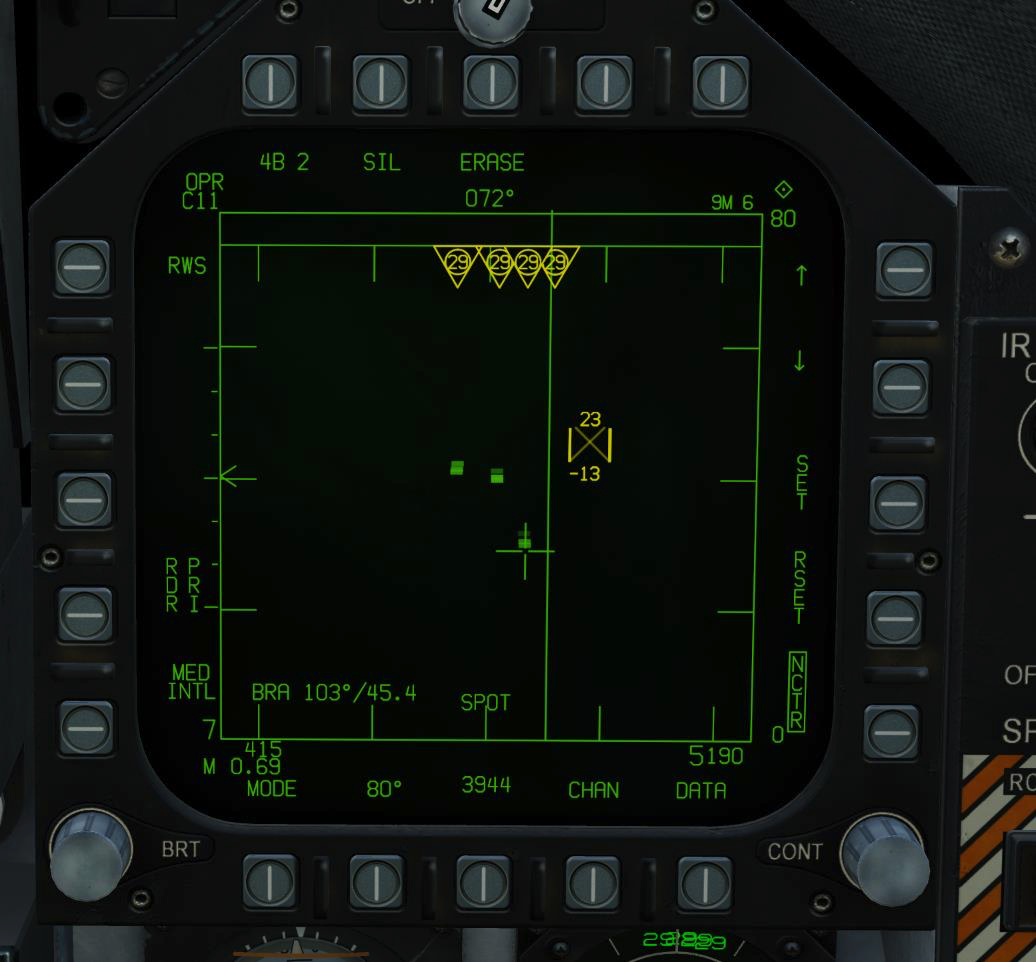
在进行超视距空战时,RWS是雷达默认的搜索模式,该模式只能用于搜索和测距,无法获取目标的详细参数,因此不能指引导弹攻击目标,RWS模式在DDI上显示的信息如下图所示:

- 雷达工作模式,当前显示为OPR,表示其正在发射电磁波,若显示STBY,则表示其处于待机模式。
- 雷达子模式,当前为RWS模式。
- 雷达脉冲重复频率(Pulse Repetition Frequency,简称PRF),可以选择高(HI)、中(MED)和INTL(交替)三种模式,其对不同距离、不同接近率的目标都有着不同的探测效果。
- 本机的速度和马赫数,当前为405节和0.72马赫。
- 雷达的水平扫描范围,可在20、40、60、80和140度之前切换,当前为80度。
- 雷达子页面,按下后可以设置其他参数。
- 本机高度,当前为9090英尺。
- 非合作目标识别模式,当距离敌机25海里内时,雷达可以根据发动机叶片的回波特性,判断飞机型号。
- RESET按钮,按下后雷达恢复默认设置。
- 距离按钮,用来调整雷达的显示距离。
- 雷达显示距离,可在5、10、20、40、80和160海里之前切换,当前为80海里。
- 选择的武器类型和数量,当前为AIM-9M,数量为2枚。
- 本机磁航向,当前为243度。
- ERASE按钮,按下后雷达屏幕上所有的目标都会被清除,直到被雷达重新探测到为止。
- SIL按钮,按下后雷达停止扫描工作,处于待机模式。
- 雷达垂直扫描范围,可在1、2、4和6行之间切换,行数越多雷达覆盖的垂直高度就越广,但所需的时间也就越长,当前为4行扫描。
- 雷达天线垂直位置,显示为屏幕左侧的<符号。
- 雷达天线水平位置。显示为屏幕中央的竖线。
- TDC游标,用于目标选择,其上下数值表示雷达覆盖的垂直高度,单位为千英尺,当前为2000~17000英尺。
- TDC游标与本机的相对位置,当前TDC游标处于本机266度方位的20.1海里处。
- 截获点提示(Acquisition Point Cue,简称ACQ),显示最高优先级的跟踪目标。
- 雷达扫描到的原始目标信号,显示为绿色矩形。
RWS模式的探测距离远,且雷达的扫描行数和角度均不受限制,因此适合大范围的空情感知。如果要在RWS模式下攻击目标,需要使用TDC游标框选图中的绿色目标信号并按下,雷达会进入STT模式。
单目标跟踪模式(STT)
进入STT模式后,此时雷达不再关注其他目标,会将全部功率汇聚到被锁定的目标上,因此容易触发目标的雷达锁定警告,该模式下可以指引导弹对单个目标进行攻击。

- 目标方位角,当前为169度。
- 攻击误差提示圆环。
- 被锁定的目标,当前速度为0.7马赫,高度为6600英尺。
- 转向提示点,是由火控计算机得出的最佳拦截点,将该点放入攻击误差提示圆环的中心,可以减少导弹由于转向产生的能量损耗,大大提高导弹的命中率。
- 与目标的接近率,当前为890节。
- 与目标的距离,当前为20.7海里。
- 选择的导弹型号和数量,当前选择的导弹为AIM-120B,数量为10枚。
- 目标指定框,用来显示目标的实际位置,▢表示未知,◇表示敌机,◯表示友机。
- 目标方位角指针,显示目标的相对航向。
- 导弹的最大射程提示,即Rmax。
- 导弹的不可逃逸区射程提示,即Rne。
- 导弹的最小射程提示,即Rmin。
- 目标当前的距离提示。
边扫描边跟踪模式(TWS)
TWS是超视距模式的一种,该模式下雷达会自动对目标的威胁进行排序,并用数字进行标记,如图所示。其显示的内容和RWS模式下大致相同,在该模式下,雷达最多可以跟踪10个目标,飞行员可以通过TDC游标对两个目标进行锁定,TWS模式下雷达的水平和垂直扫描范围都会受到限制,因此探测范围小于RWS模式,该模式可以指引导弹进行多目标攻击。使用TWS指定目标后,其参数也会在HUD上显示。

- 雷达子模式,当前为TWS模式。
- EXP模式,雷达视图将以目标为中心10海里进行放大,提供水平方向20度的扫描范围。
- 导弹动态射程标尺,用来判断目标是否进入射程。
- L&S(Launch & Steering Primary Target),雷达的首要攻击目标,以★符号显示,其左右两侧的数值分别为飞机当前的马赫数和高度,其当前的速度为0.5马赫,高度为6500英尺。
- DT2(Secondary Designated Target),雷达的次要攻击目标,以◇符号显示,其左右两侧的数值分别为飞机当前的马赫数和高度,其当前的速度为0.5马赫,高度为6500英尺。
- 雷达扫描中心方式,设置雷达天线是否自动跟随目标运动,可以在手动(MAN)、自动(AUTO)和偏置(BIAS)之前切换。
- RAID模式,雷达将以目标为中心10海里进行放大,提供水平方向22度,垂直方向3行的扫描范围,以提高对目标的数据刷新率。
- HITS按钮,由于TWS模式最多只能建立10个跟踪文件,因此当目标多余10个时,剩余的目标会以绿色方框进行显示。
- HUD上首要目标的实际位置,以▢或◇符号显示。
- HUD上次要目标的实际位置,以✕符号显示。
聚焦模式(SPOT)
SPOT是RWS和TWS模式下的一种特殊子模式,通过长按锁定键来启用,此时雷达会聚焦以TDC游标为中心22度范围的区域,SPOT模式提供了非常高的刷新率,可以用来区分密集编队的目标。
自动截获模式(AACQ)
当雷达处在非近距离格斗模式时,AACQ可以让飞行员快速从超视距模式切换至STT模式。启用该模式时,若TDC游标正好覆盖了一个目标,则雷达会锁定这个目标,否则雷达会试图锁定视场中距离最近的目标。

孔径模式(BST)
BST是近距离格斗模式的一种,最远可以搜索10海里内的目标,雷达的水平扫描范围为3.3度,垂直扫描范围为-1.7到+1.7度,同时HUD上会用一个虚线圆显示雷达的视场,目标一旦进入,雷达会自动锁定并切换至STT模式。

垂直截获模式(VACQ)
VACQ是近距离格斗模式的一种,最远可以搜索5海里内的目标,雷达的水平扫描范围为6度,垂直范围扫描为-13到+46度之间。目标一旦进入HUD上显示的两条虚线范围内,雷达会自动锁定并切换至STT模式。

广角截获模式(WACQ)
WACQ是近距离格斗模式的一种,最远可以搜索10海里内的目标。在Cage子模式下,雷达的水平扫描范围为60度,垂直扫描范围为-9到+6度,此时雷达的俯仰与飞机随动,但是在水平方向上保持稳定。在Uncage模式下,飞行员可以通过TDC游标控制扫描的中心点,此时雷达在俯仰和水平方向都保持稳定。HUD右下角会显示当前的扫描范围,其中y轴的刻度每一格表示15000英尺,雷达会锁定第一个发现的目标并自动切换至STT模式。

机炮截获模式(GACQ)
GACQ是近距离格斗模式的一种,当选择空对空机炮后,该模式将自动启用。此时雷达最远可以搜索10海里内的目标,雷达的水平扫描范围为20度,垂直扫描范围为-14到+6度之间,同时HUD上会用一个虚线圆显示雷达的视场,目标一旦进入,雷达会自动锁定并切换至STT模式。

光电系统
除雷达以外,战斗机上通常还装备有光电搜索系统。以Su-27为例,其搭载OEPS-27光电搜索跟踪系统(Infrared Search and Track System,简称IRST)由TS-100数字计算机进行控制,OLS-27的传感器安装在驾驶舱风挡的正前方。该系统是一套被动系统,它本身不向外辐射信号,只被动接受敌机发出的红外信号,因此锁定时不会触发敌机的雷达锁定警告,可以实现“静默”攻击。但在这种模式下,只能发射红外制导的导弹。结合Shchel-3UM头盔瞄准具,飞行员可以通过转动头部,使用头盔上的圆环目视完成对敌机的锁定。

下图是F/A-18C上装备的头盔显示器(Helmet-Mounted Display,简称HMD),其功能与AR类似,头盔中显示的信息与HUD上的基本一致,包括飞机的运动参数、数据链标识和导航符号等。HMD配合AIM-9X格斗弹,可以实现非常恐怖的大离轴发射。

下图是美国为F-35装备的最新款头盔显示器,价值40万美元,其直接取代了HUD,将飞机的各种数据集成到头盔里,配合光电分布式孔径系统(Electro-Optical Distributed Aperture System,简称EODAS)甚至可以让飞行员看穿机体,拥有更好的视野。

数据链
由于机载雷达受到体积和功率的限制,因此探测距离非常近,且雷达大多安装在机头,其无法发现身后的目标,所以早期飞机的探测范围十分有限。为了解决上述问题,数据链(Data Link)的概念被人提出,其通过专用的加密链路以实现不同作战平台之间的信息共享(例如预警机、军舰、地面单位等),大大提升了飞机的态势感知能力和作战效率。下图为F/A-18C上使用的数据链符号,即便本机不开雷达,依然能够通过友军数据链提供的信息发现目标,其中红色表示敌军,绿色表示友军,黄色表示未知。

数据链还可以为制导武器提供中继引导,飞行员可以在防区外发射武器,然后交由卫星、预警机等其他平台负责指令修正,以避免自身长时间暴露在敌防空武器的射程范围内。除此之外,借助数据链的帮助,“人在回路”为飞行员提供了武器投放后仍能手动修改攻击目标的能力。
机炮
机炮(Gun),也称作航炮,是指口径大于20mm、能够连续发射的武器。通常来说,机炮的口径越大,威力也就越大,但是重量会增加、射速和备弹量会降低,尤其是在转瞬即逝的空战中,能够在与敌机交汇的零点几秒中拉出一条弹幕则显得尤为重要。
然而,现在各国对机炮的去留问题仍存在争议,例如美国空军装备的F-35A则保留了机炮,但是像我国的J-20、美国海军陆战队装备的的F-35B型和美国海军装备的F-35C型都没有装备机炮。机炮反对者认为,现代遭遇视距内空战的概率非常小,因此没有必要再将重量和空间留给一门小概率使用的武器。机炮支持者认为,机炮可以不用但不能没有,他们拿美国在越战的经历为例,由于当时信仰“导弹万能论”,因此早期的F-4“鬼怪”战斗机没有装备机炮,但那个时期的导弹性能不佳,导致美军飞行员射完导弹后只能朝北越飞行员骂街,因此到了后来的F-4E型上又把机炮装回来了。毕竟谁也说不准,如果隐身飞机交战,互相没法在超视距上发现目标,那就又回到了传统的狗斗。
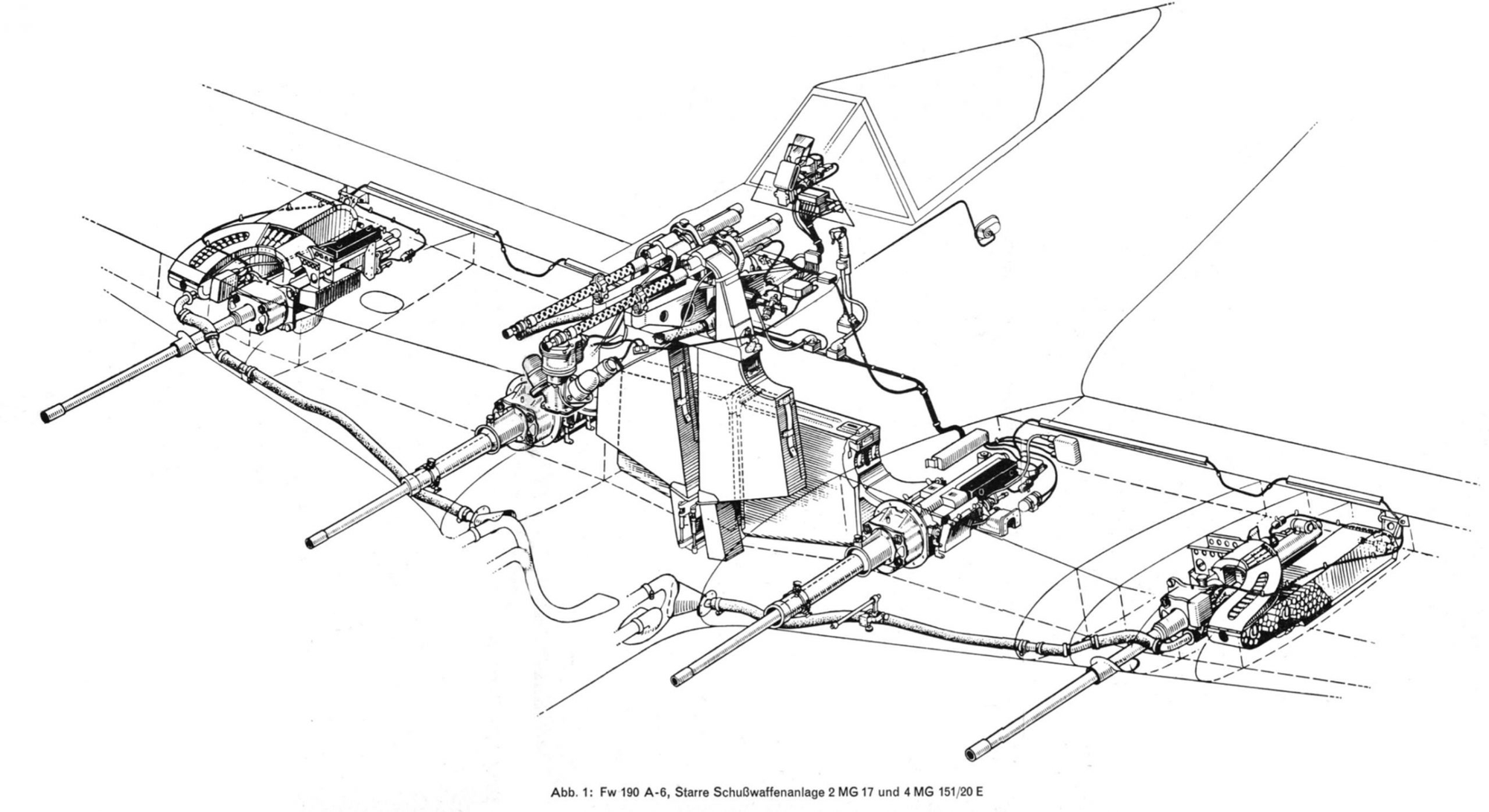
在二战时期,战斗机通常都是多门机枪+多门机炮的配置。例如德国的Fw 190 A-6战斗机,配备有2门7.92mm MG 17机枪和4门20mm MG 151机炮。在当时,机炮有多种安装方式,最常见的就是装载在机翼上,俗称翼炮。但由于偏离飞行员的瞄准轴线,需要调整武器交汇点,因此弹药投送效率偏低。
另一种常见的方式是装载在机身的中轴线上,俗称轴炮。相比翼炮,轴炮便于飞行员的瞄准,弹药投送效率高。但是但为了避免射出的子弹打中飞机的螺旋桨,通常需要安装射击协调器,增加了额外的重量。
还有一种方式就是安装机炮吊舱,通常是为了弥补火力不足,但是会影响飞机原本的气动外形。

早期的空战中,飞行员都使用简易的机械式或反射式瞄具,试想一下激烈的空战中,双方都以几百公里的速度运动,飞行员只能依靠经验去预判机炮的瞄准点,是多么高难度的事情。

现代飞机通常只装备一门机炮,例如美国F/A-18C装备的M61火神 20mm六管机炮,备弹578发,射速为4000-6000发每分钟;苏联Su-27装备的GSh-30-1 30mm单管机炮,备弹150发,射速为1500-1800发每分钟。

现代飞机的机炮瞄准方式一般有两种:无引导模式和雷达引导模式,以F/A-18C为例,下图(左)为无引导模式。飞行员可以通过UFC输入敌机的翼展长度,在该模式下火控计算机会计算出机炮在运动过程中的抛物线弹道,并在HUD上以两条曲线显示,俗称漏斗线,用来估算距离和机炮落点。飞行员操纵飞机将目标机翼的两端和漏斗线的两端对齐,此时扣动扳机即可命中。该模式不使用雷达,无法获取敌机的距离、速度大小和方向等信息,命中率较低,因此只适合在雷达无法锁定敌机的情况下使用。

如果想要提高命中率,则需要使用雷达引导模式来锁定敌机,此时雷达会测算敌机的距离和速度矢量,火控计算机负责根据目标的运动轨迹计算出瞄准点,如上图(右)所示。飞行员只要操纵飞机将带圆圈的准心套上敌机所处位置的菱形框,然后扣动扳机即可命中,在该模式下机炮的命中率极高。
空空导弹
总有人说,螺旋桨时代的机炮格斗才是空战的浪漫,进入喷气飞机+导弹时代后,动动手指、按下按钮、操作一下电子面板,就能将对手解决,说好的骑士对决?说好的竞技格斗呢?对不起,我也想开挂。
结构
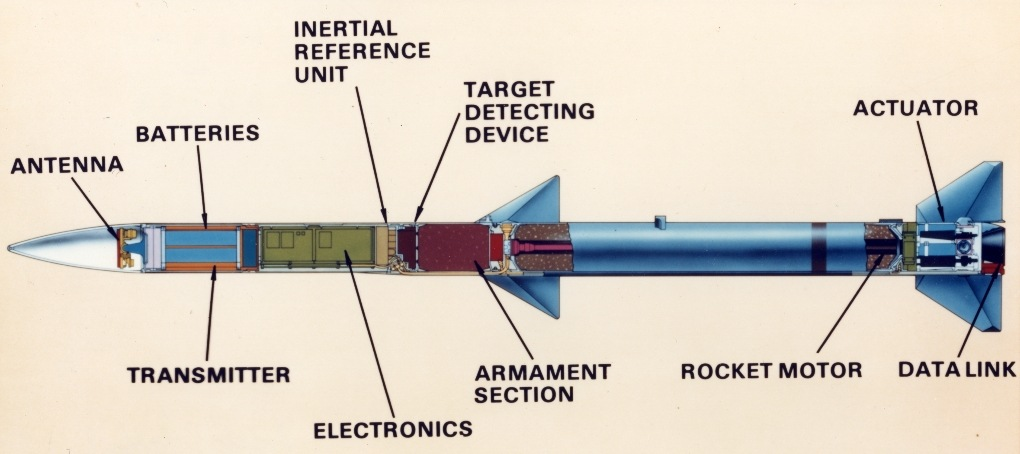
空空导弹的结构大相径庭,从前往后分别是:导引头、飞行控制系统、引信、战斗部、固体燃料、火箭发动机、尾舵,价格从几十万美元到几百万美元不等。
射程
不像电影和其它游戏中描述的那样,现实中的导弹没有无限动力,近程空空导弹发动机的工作时间仅为几秒,即便是远程空空导弹发动机的工作时间也不过十几秒。导弹在发射后依靠固体火箭发动机的强大推力加速到2-5马赫,剩下全程依靠惯性飞行。学过牛顿定律的都知道,由于导弹在空气中会受到摩擦阻力,因此导弹的整体能量一直是在减小的(总能量=动能+重力势能),下图为DCS中不同导弹在30000英尺、0.9马赫时发射的速度-时间图。
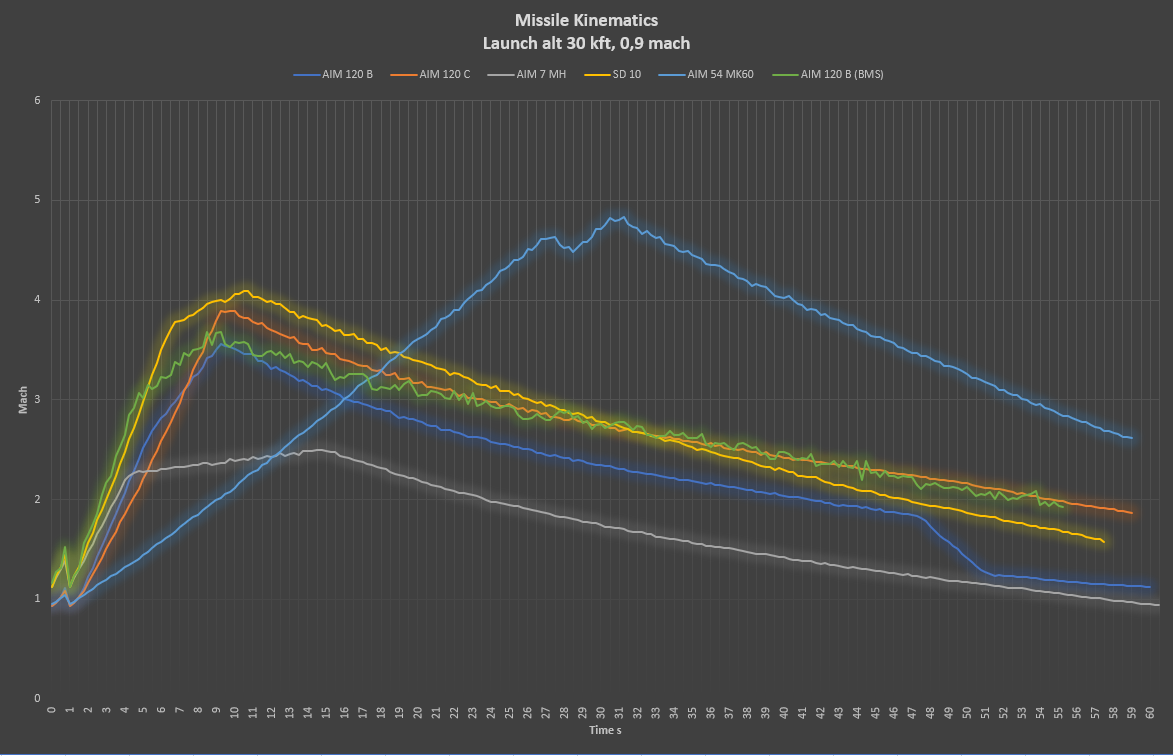
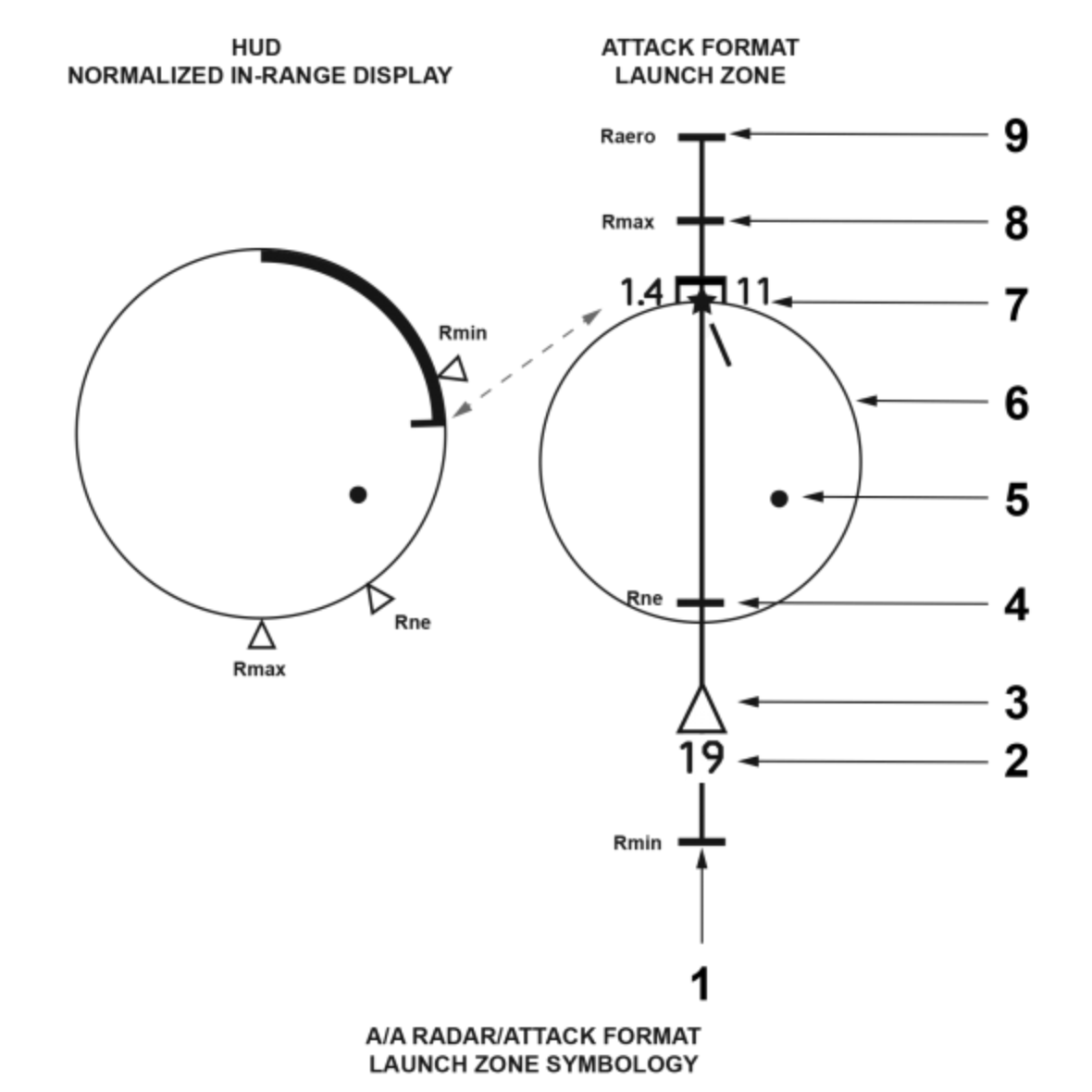
需要明确指出的是,导弹的射程并非是个固定值,其受到本机和目标运动状态等诸多因素的影响。以投放高度为例,不同高度下空气的密度是不同的,高空的空气较稀薄,空气阻力较小,导弹能量损失较少,射程就远;低空的空气较稠密,空气阻力较大,导弹能量损失较多,射程就近。举个例子,苏联的R-27空空导弹,在高空最大射程有40公里以上,但在低空只有20公里。此外,飞机速度、上抛角度等也能很大程度影响导弹的射程,火控计算机会根据这些因素对导弹的射程进行实时计算,并显示为动态发射区(Dynamic Launch Zone,简称DLZ)。以F/A-18为例,其包含有4个射程:Rmin、Rne、Rmax和Raero。
- Rmin:导弹发射的最小距离,也称作安全距离,导弹只有在飞行一定的距离后引信才会解锁,否则爆炸的破片可能会伤及自身。
- Rne:不可逃逸区(No Escape),如果此时发射导弹,即使目标采取防御机动,例如掉头逃跑,导弹仍有较大的概率命中目标。
- Rmax:如果此时发射导弹,假设目标不进行防御机动,即不考虑其潜在的机动能力,导弹仍能命中目标的最大射程。
- Raero:最大气动射程,假设目标静止不动、处于最佳发射条件时,导弹理想状态下的最远飞行距离。
通常来说,当导弹处于有动力飞行阶段,即不可逃逸区内时,由于导弹的燃料还未耗尽,有足够的能量进行机动,且导弹的速度比战斗机快很多,其抗过载能力可以达30-60G,而飞行员可以承受的最大过载一般为9G,因此理论上在这个区域内的飞机不可能依靠简单的机动来摆脱导弹,除非使用干扰弹、电子对抗等其他手段。
而当导弹处于无动力飞行阶段,即仅依靠惯性飞行时,此时导弹的燃料耗尽,其能量一直在不断减少,只要飞行员沉着冷静,采取合理的防御机动进行规避,就能把导弹仅存的能量耗尽,在很大概率上能够摆脱导弹。因此,盲目追求导弹的最大射程是没有意义的,导弹在最大射程处的能量几乎为零,命中率很低,只要对方飞行员不傻都能躲开。如果想提高空空导弹的命中率,最好等敌机进入不可逃逸区以后再开火。
按照射程的远近,可以将导弹分为:近程空空导弹、中程空空导弹、远程空空导弹。通常来说,近程空空导弹的机动性强,中、远程空空导弹的机动性差。
下图为美军的AIM-54“不死鸟”导弹,最大射程约为180公里,由于其庞大的体积和重量,只能挂载在F-14“雄猫”战斗机上,且最多只能挂载6枚。

下图为美军的AIM-120 AMRAAM和AIM-9“响尾蛇”导弹,其不同子型号之间的性能差异较大。AIM-120C的最大射程约为105公里,AIM-120D型的最大射程约为160公里,AIM-9M的最大射程约为18公里,AIM-9X的射程约为35公里。

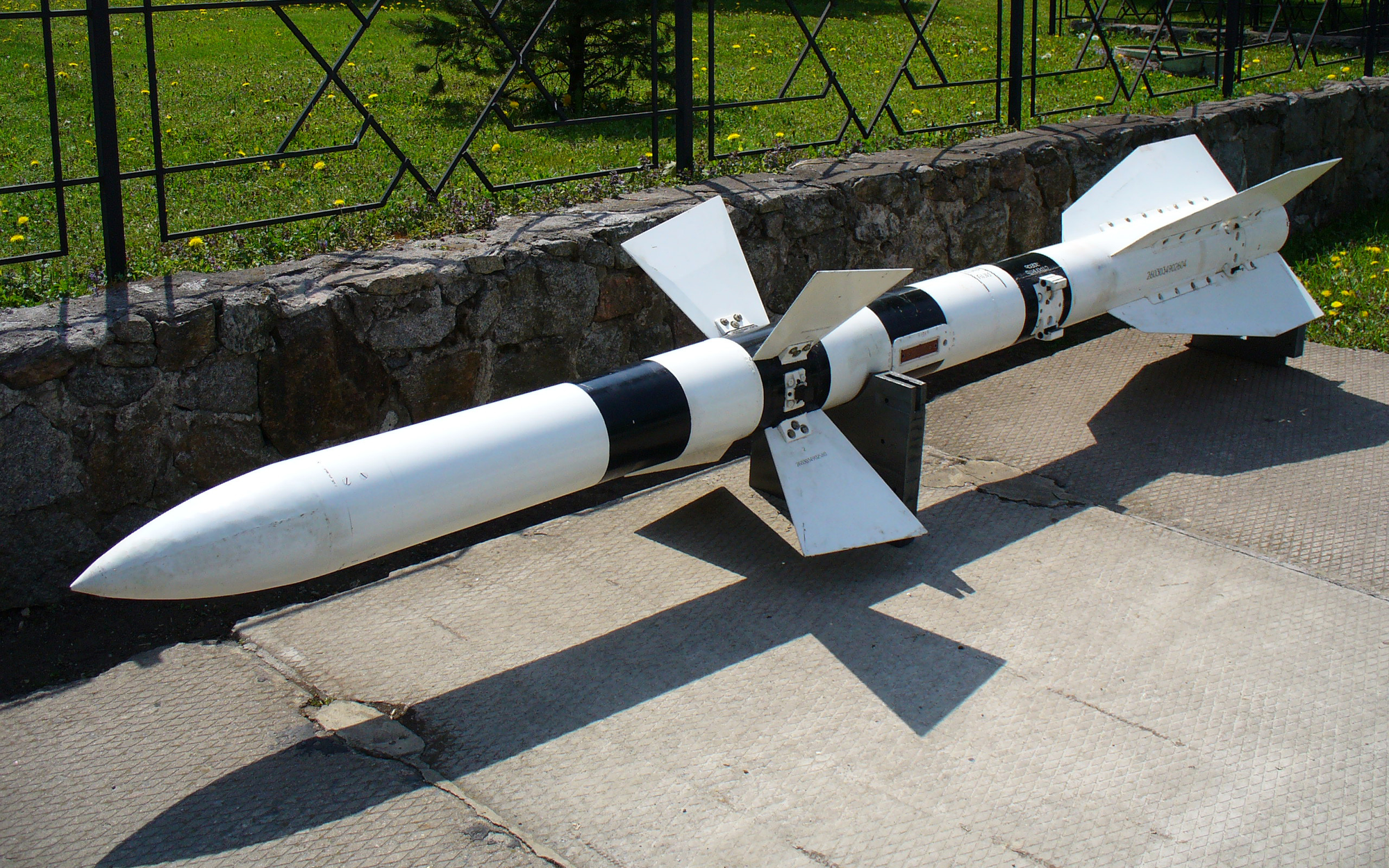
下图为苏联的R-27空空导弹,包含有7种子型号,例如R-27ER的最大射程为75公里,R-27ET的最大射程为70公里,R-27EM的最大射程为110公里,R-27EA的最大射程为130公里。
下图为苏联的KS-172超远程空空导弹,最大射程可以达到400公里,专门用来攻击敌军的预警机,由于其庞大的体积和重量,最多只能挂载1~2枚。

下图为我国的PL-12导弹,最大射程约为100公里。

下图为我国J-20挂载的4枚PL-15和2枚PL-10,其中PL-10的最大射程约为20公里,PL-15的最大射程超过200公里。

制导方式
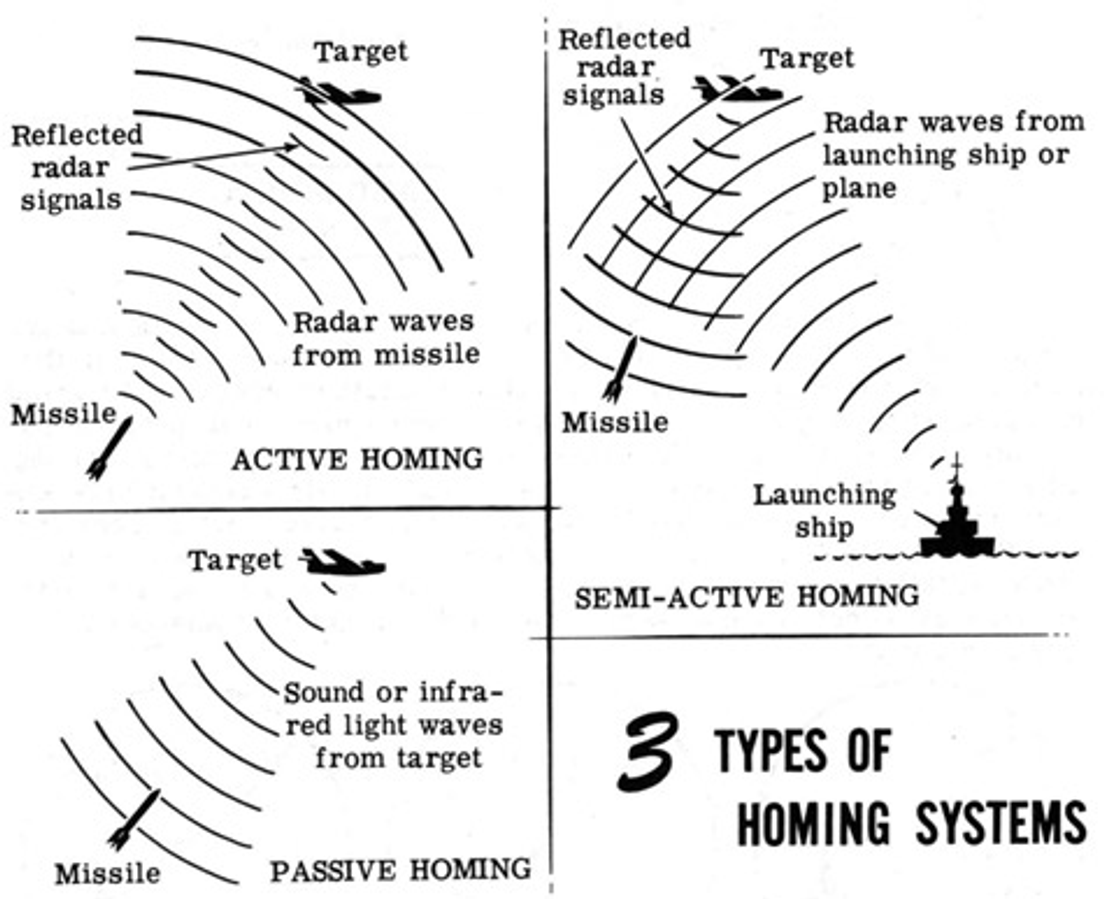
- 主动雷达制导:导弹自身搭载雷达,自己发射雷达信号并接收目标反射的回波,可以在一定程度上做到“射后不管”。但雷达体积一般比较大,普遍安装在中远程空空导弹上,比如:美国AIM-54、美国AIM-120、苏联R-77、中国PL-12、中国PL-15、中国PL-21。
- 半主动雷达制导:由战斗机发射雷达信号,导弹本身不搭载雷达,仅仅接收目标反射的回波,需要在命中目标前持续照射,无法做到“射后不管”,属于比较早期的制导方式,现在几乎被淘汰,比如:美国AIM-7、苏联R-27。
- 红外制导:属于被动制导,本身不发出信号,导弹捕获敌机发出的红外辐射跟踪目标,通常安装在近程空空导弹上,可以“射后不管”,比如:美国AIM-9、苏联R-73、中国PL-10。
通常来说,中远程空空导弹都采用复合制导的方式,比如美国的AIM-120系列,飞行中段使用惯性和无线电指令制导,飞行末端使用主动雷达制导,在靠近目标约10海里时打开自身的弹载雷达去搜索和跟踪目标。
Fox代码是北约飞行员发射武器时所使用的无线电通讯简码,在电影中经常能听见,包含有如下4种:
- Fox 1:发射半主动雷达制导导弹,比如AIM-7。
- Fox 2:发射红外制导导弹,比如AIM-9。
- Fox 3:发射主动雷达制导导弹,比如AIM-120和AIM-54。
- Fox 4:发射机炮,已经停用,现用“Guns Guns Guns”替代。
通常来说,空空导弹都会采用近炸引信,使用高爆预制破片战斗部,不需要直接命中目标,只要导弹离目标足够近就会自动引爆,向四周发射无数的金属破片来毁伤飞机,因此不太可能像电影中那样与导弹擦肩而过却安然无恙。而且导弹的导引头只能捕获自身前半球的目标,不可能错失目标后又绕回来继续攻击,通常脱锁一定时间后就会自爆。

还有一点要指出的是,现代空空导弹不会像电影中那样跟随目标的轨迹运动,因为这样一点也不节能,而是会使用前置追踪的策略,计算出最佳的拦截点(即预判你的走位),如下图:
反制措施
雷达告警系统
雷达告警系统(Radar Warning System,简称RWS)几乎是现代飞机的标配,用来感知敌方雷达的照射,虽然每个国家的RWS都有不同的设计思路,但工作方式大同小异。RWS是一个被动系统,它不向周围发射能量,根据安装在机身周围的传感器被动接收雷达信号,可以判断雷达发射源的位置、工作模式等,如下图(左)是F/A-18C上使用的AN/ALR-67雷达告警接收器(Radar Warning Receiver,简称RWR)。
RWR会将探测到的辐射源信号与数据库中的信息进行对比,从而判断雷达型号并以符号形式显示在面板上。图(右)显示了北约国家所使用的RWR符号编码表,根据该表可以得知,此时正前方有一台SA-15和两台SA-6,其中SA-15已经锁定了我们随时有可能发射导弹。需要注意的是,RWR只能测量辐射源的方位而无法测算距离,其圆环由外到内仅能表示辐射源威胁程度的高低,根据探测到的雷达工作模式,RWR还会针对性地发出不同的告警音以提醒飞行员。
干扰弹
当听到高频的导弹发射告警音时,如果你还不做点什么,那可能很快就要凉了,现代军用飞机上都会携带两种类型的干扰弹:热焰弹(Flare)和箔条弹(Chaff)。以F/A-18C为例,其干扰弹安置在进气道的底部,可以在MFD中进行编程,设置投放数量、投放波次和投放间隔等参数。如下图所示,飞机当前携带有30枚箔条弹(C)和14枚热焰弹(F),针对不同型号的来袭导弹,飞行员可以选择不同的投放程序以达到最佳的防御效果。

热焰弹在电影中很常见,其通过投放大量的燃烧物(例如镁粉、硝化棉、聚四氟乙烯等)来干扰红外制导导弹的正常工作,但是对于雷达制导的导弹无效,效果如下图所示(非常壮观,很适合在航展和MV中秀烟花)。早期的红外制导导弹非常容易被干扰,例如美国早期的AIM-9甚至会去追太阳,后期的改进型主要是增强抗干扰能力、过载能力、离轴发射角和射程等,美国宣称其新研制的AIM-9X已经具备图像识别功能,可以根据红外图像识别出飞机、干扰弹和太阳。

箔条弹是由金属泊或金属丝构成的,用来散射敌方的雷达信号,可以欺骗主动雷达制导和半主动雷达制导的导弹,但对红外制导导弹无效。
电子对抗
电子对抗(Electronic countermeasures,简称ECM)通过制造噪声从而欺骗和干扰敌方的雷达信号,降低敌方雷达的跟踪和锁定距离。以F/A-18C内置的AN/ALQ-165电子干扰系统为例,当接收到一个雷达信号时,该系统会侦测、处理并发射一个模拟的目标回波来欺骗敌方的雷达,这个模拟的回波将被敌方雷达识别为实际目标回波,使敌方无法建立对本机的跟踪。然而,电子干扰并不是万能的,当距离足够接近时,雷达还是有能力从噪声中区分出真实的回波信号,从而建立跟踪和锁定,这种现象称为“烧穿”。
机动规避
虽然导弹的速度和机动能力远高于飞机,但是正确的机动规避也可以降低敌方导弹的命中率,通常有如下几种方式:
- 通过俯冲将导弹拉入低空,稠密的大气会迅速消耗导弹的能量。
- 在保证自己不会昏迷的前提下,做一些高过载的机动迫使导弹改变飞行路线消耗其能量。
- 利用地形的掩护,比如山地和建筑,利用地面杂波干扰导弹正常工作。
- 根据多普勒雷达的工作原理,它比较容易捕捉接近和远离的目标,将对方置于自己的3点钟或9点钟方向,尽可能保持距离不变。
在实战中,通常是上述几种方式同时使用,打开电子干扰缩短敌方雷达的探测和锁定距离,一旦RWS检测到敌方发射导弹,一边机动规避一边投放热焰弹和箔条弹。如果你在敌方导弹的不可逃逸区之外,那么很大概率能躲掉;如果你在敌方导弹的不可逃逸区之内,方法同上,但同时要向上帝祈祷,如果实在躲不掉,还有最后一招——弹射跳伞。

- 作者:PLUS
- 链接:https://tangly1024.com/article/dcs-air-to-air
- 声明:本文采用 CC BY-NC-SA 4.0 许可协议,转载请注明出处。










